|
I am a M.S. student at UIUC, where I study computer vision and robotics. I've previously worked and studied at EPFL, Tesla, and EPFL Hyperloop+. I received my bachelors with Highest Honors at the University of Illinois at Urbana-Champaign. I was a Chancellor Scholar, and received the Edward C. Jordan Award and the Daniel W. and Carol A. Dobberpuhl Student Award. CV / Google Scholar / Github / LinkedIn |

|
|
I come from signal processing background with emphasis on image processing. I've also taken courses in machine learning and control. I want to combine to find new and exciting applications of computer vision and image processing in robot perception. |
|
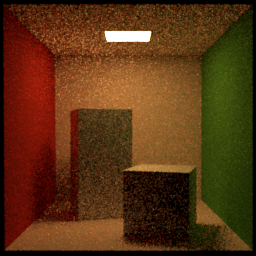
Dohun Jeong, advised by Prof. Minh N. Do, Renan Rojas-Gomez Bachelor Thesis, 2020 paper / slides Explored rendering equation optimization and machine learning based methods to estimate scene parameters such as depth and surface reflectance based on a single image. |

|
EPFL Hyperloop Team, SpaceX Hyperloop Pod Competition, 2019 (Third Place) project page / video Designed, built, and tested the electronics that integrates the pod's computer, sensors, actuators, communication system, and battery system that controlled the first linear induction motor propelled hyperloop in the SpaceX competition. Also designed, built and tested the wiring harness that can withstand the vibrational load. |
|
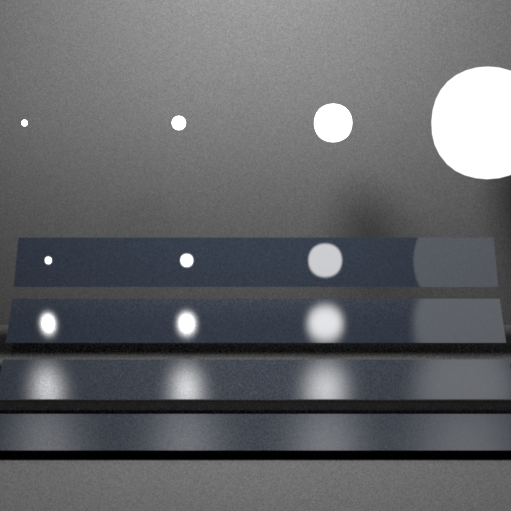
Dohun Jeong EPFL CS-440, Spring 2019 course page / example image/ report Implemented an Octree-accelerated path tracer with multiple importance sampling, various BSDF (including Disney BSDF), various lighting (including image based lighting) for CS-440 Advanced Computer Graphics at EPFL. |
|
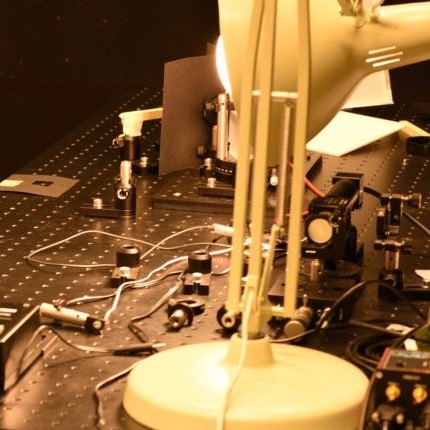
Dohun Jeong, advised by Adam James Scholefield, Adrien Hoffet, Arnaud Latty Bachelor Semester Project, 2019 slides Digital Lippmann Camera is a hyperspectral camera concept developed at LCAV. In order to recover the spectral information of the scene, the camera requires sub-micron precision control of the mirrors in a Michelson interferometer. This project utilized monochromatic lasers and photodiodes to find accurate displacement of piezo actuators for controlling the mirrors of the imager. |
|
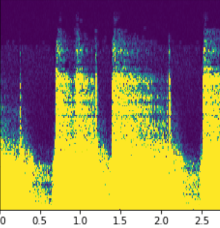
Dohun Jeong, Nicola Figari COM-415 Final Project, Fall 2018 code / report This project explores various ways of detectingi the beat of the music, and automatically control a Neopixel LED matrix to time the light changes with the beat of the music. The various methods (Energy, STFT, etc.) are tested on several audio clips, and their performances are compared. |
{kind=link}
|
|
|
|
Dohun Jeong, Alkin Ozyapici, supervised by Prof. Erhan Kudeki Fall 2019, Spring 2020 course page / GitHub (Private) Designed new Jupyter Notebook exercises to introduce students to the concept of Fourier Series, Fourier Transform, sampling, as well as important Python practices in numerical coding such as vectorization and masking. Also led two discussion/lab section every other week for a total of 6 sessions during the semester, both in person and remote. |
|
This website template was taken from Jonathan Barron's public repo.
You can also visit his website.
|